Consumption models
The WRT was originally implemented in the context of the research project MariData. Within this project, the power/fuel modelling framework mariPower was developed by project partners from the Institute of Fluid Dynamics and Ship Theory of the Hamburg University of Technology. The mariPower package is closed source software and this will most likely not change in the future. For users with access to mariPower, more details on the installation and the communication between the consumption model and the WRT can be found in the respective section below.
To enable users to test the WRT functionality without further installation of software for consumption modelling, we have startet the implementation of a simple consumption model based on the Direct Power Method as described in the ITTC - Recommended Procedures and Guidelines. Please check the respective section for further details.
New ships with their own power/fuel model can be integrated by implementing a new ship class and using it in the config.
mariPower
The mariPower package allows to predict engine power and fuel consumption under various environmental conditions for specific ships that have been investigated in the MariData project. More details about the package and the project as a whole can be found in this publication. For users with access to mariPower, the software can be installed as described below:
clone the repository
change to the folder:
cd maripowerinstall mariPower:
pip install .orpip install -e .
In the following, the communication between mariPower and the WRT shall be described. Information is transferred via a netCDF file between the WRT and mariPower of which the file path can be set via the config variable COURSES_FILE. The coordinate pairs, courses, the ship speed and the time for which the power estimation needs to be performed are written to this file by the WRT. This information is read by mariPower, the calculation of the ship parameters is performed and the corresponding results are added as separate variables to the xarray dataset. The structure of the xarray dataset after the ship parameters have been written is the following:
Dimensions: (it_pos: 2, it_course: 3)
Coordinates:
* it_pos (it_pos) int64 1 2
* it_course (it_course) int64 1 2 3
Data variables:
courses (it_pos, it_course) float64 ...
speed (it_pos, it_course) int64 ...
lat (it_pos) float64 ...
lon (it_pos) float64 ...
time (it_pos) datetime64[ns] ...
Power_delivered (it_pos, it_course) float64 ...
RotationRate (it_pos, it_course) float64 ...
Fuel_consumption_rate (it_pos, it_course) float64 ...
Calm_resistance (it_pos, it_course) float64 ...
Wind_resistance (it_pos, it_course) float64 ...
Wave_resistance (it_pos, it_course) float64 ...
Shallow_water_resistance (it_pos, it_course) float64 ...
Hull_roughness_resistance (it_pos, it_course) float64 ...
The coordinates it_pos and it_course are iterators for the coordinate pairs and the courses that need to be checked per coordinate pair, respectively. The function in the WRT that writes the route parameters to the netCDF file is called ship.write_netCDF_courses. Following up on this, the function get_fuel_netCDF in the WRT calls the function PredictPowerOrSpeedRoute in mariPower which itself initiates the calculation of the ship parameters. The netCDF file is overwritten by the WRT for every routing step s.t. the size of the file is not increasing during the routing process.
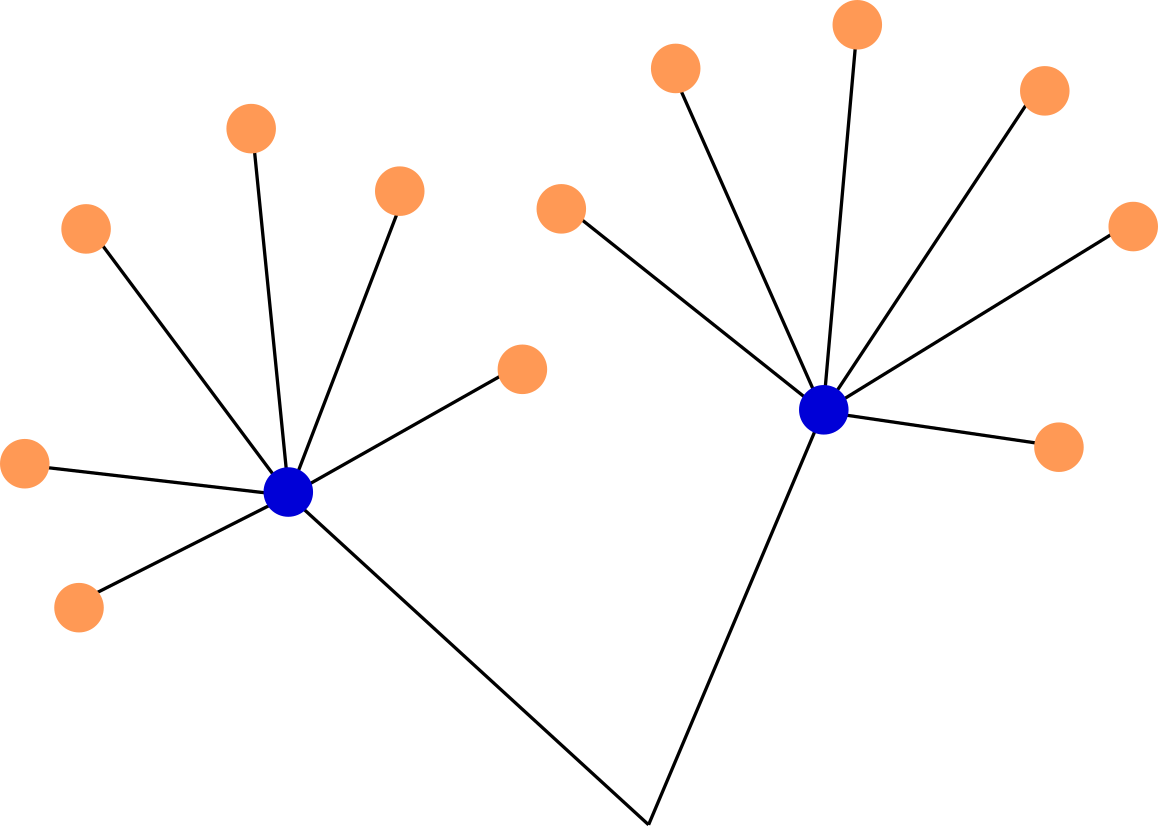
Fig.2 Schema to visualise which coordinate pairs are send in a combined request to mariPower for fuel estimation in case of the isofuel algorithm. All coordinate pairs marked by orange filled circles are send for the second routing step. Coordinate pairs marked with blue filled circles are endpoints after the first routing step that survived the pruning.
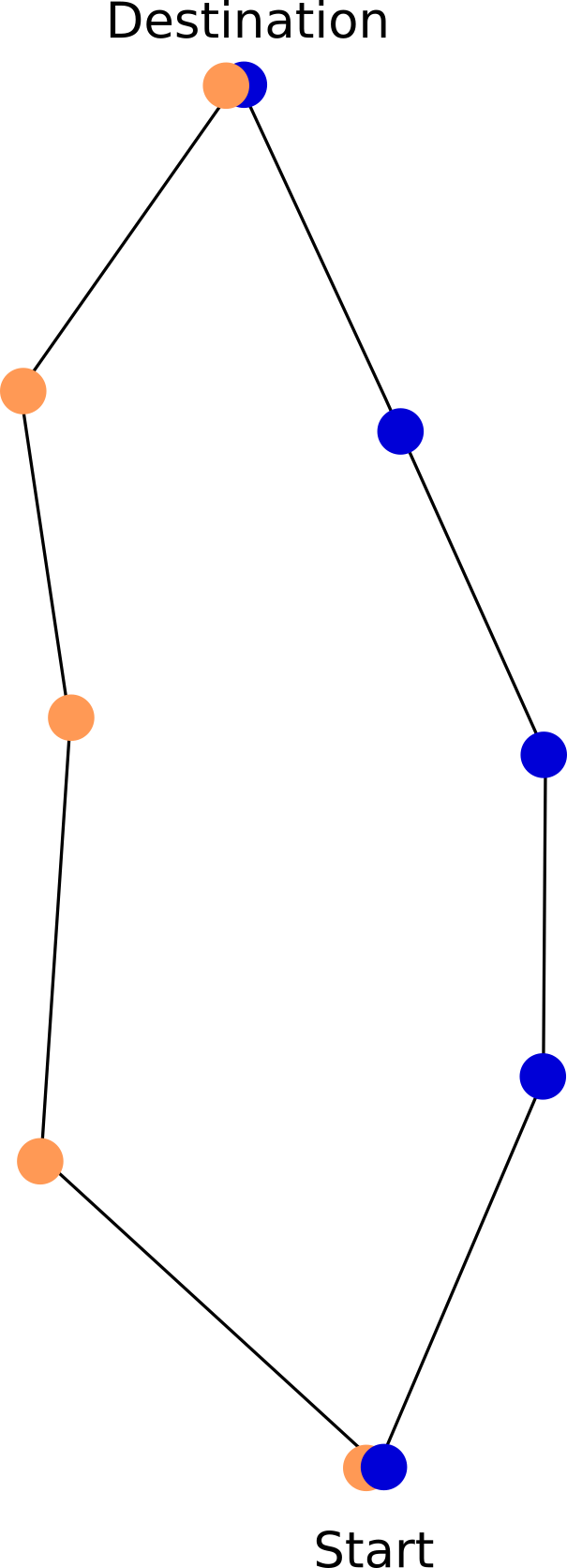
Fig.3 Schema to visualise which coordinate pairs are send in a combined request to mariPower for fuel estimation in case of the genetic algorithm. All coordinate pairs marked by the same colour are send in one request.
Both for the isofuel algorithm and the genetic algorithm the same structure of the netCDF file is used. However, due to the different concepts of the algorithms, the entity of points that is send for calculation in one request differs between both algorithms. For the isofuel algorithm, all coordinate pairs and courses that are considered for a single routing step are passed to mariPower in a single request (see Fig. 2). For the genetic algorithm all points and courses for a closed route are passed in a single request (see Fig. 3).
Direct Power Method
In case users would like to quickly test the WRT functionality, they can activate our implementation of the Direct Power method. This can be done by using the configuration SHIP_TYPE='direct_power_method' and specifying the mandatory config parameters:
'BOAT_SMCR_POWER': power at maximum continuous rating (kWh)'BOAT_FUEL_RATE': fuel rate at the working point (g/kWh)'BOAT_LENGTH': boat length overall (m)'BOAT_BREADTH': boat breadth (m)'BOAT_HBR': boat height (m)
This will estimate the power consumption based on several assumptions and a simple model. It is assumed, that the ship travels at a fixed working point of propeller power and ship speed. The value pair that is considered corresponds to 75 % of the SMCR power and the ship speed. Both, the SMCR power and the ship speed need to be provided by the user in the config file and it is left to the user to select sensible values for this working point. The power consumption is then calculated as the sum of 75 % SMCR power and the power consumption caused by the added resistance due to environmental conditions. The power consumption due to added resistance is estimated using the Direct Power Method as described in the ITTC - Recommended Procedures and Guidelines. The power consumption that has been calculated for the fixed working point is then extrapolated towards the true ship speed using the dependency
\(P ~ v^3.\)
Currently, only the added resistance due to wind is considered using the regression formula by Fujiwara et al; the consideration of waves is planned for the future. Of course, results will only be rough estimates, but this simple model enables the user to quickly test functionality and performance of the code and get some first ideas of possible routes.